1

產業
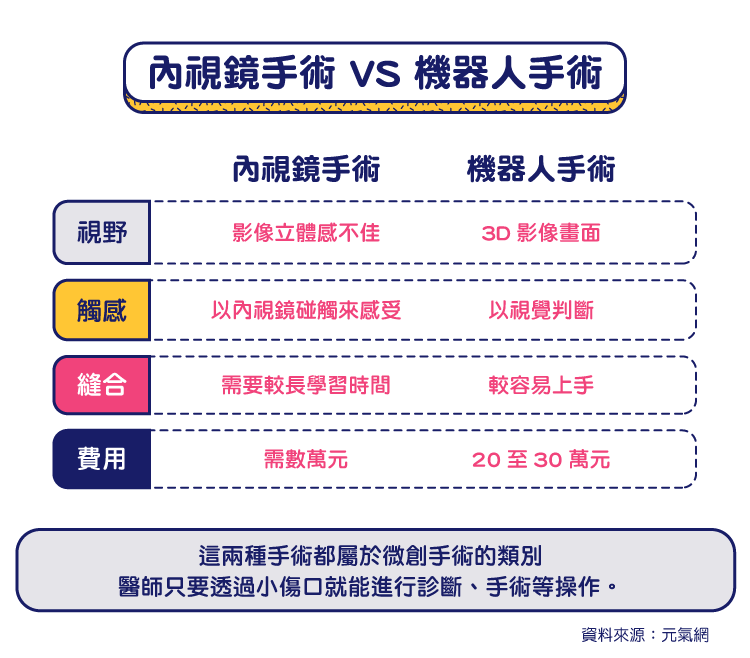
微創手術可說是外科的最佳糖衣,它終結了傳統手術中最駭人聽聞的開腹手術;只要透過 1 到 2 公分創口,就能在體內進行切除、修補與電燒等細微動作。這也讓動不動就要給你開胸剖肚的傳統手術,在微創手術面前顯得黯然失色。
雖然現今的醫學技術早已不可同日而語,但醫學可謂是在黑暗中逐步探索出來的歷史。若說麻醉技術,是 19 世紀那道劃破黑夜的流星;那麼微創手術,可謂是讓 20 世紀的黑夜不再黯淡的極光。
想要在微小的創口中進行手術,若沒有機械手臂提供穩定且精密的動作輔助,將會很難能夠達成手術目標。
雖說如此,但製造機器手臂可不是簡單的事;雖然不若機器人那般複雜,但要在有限的創口空間中進行一系列縝密的手術操作,可是需要相當機械、電子等工業技術的結合,才有可能實現。
二次大戰結束後的 1950 至 1960 年代,是工商業經歷百廢待舉的戰時階段後,最為蓬勃發展的時期。資本主義更也促成產業技術上的競爭,所有人無不想著,如何透過規模與效率化的生產方式來擊敗對手。
最聰明的方法,就是讓幾乎不會犯錯、又能持續運轉的機器人來進行生產製造。這也是科幻作家-卡雷爾·恰佩克 (Karel Čapek) 於 1921 年發表《羅素姆的萬能機器人》 (Rossum’s Universal Robots) 後,開始有人認真構想如何讓機器人成為現實。
即使這想法也太晚才出現,但在 1956 年第一間機器人公司 – Unimation 成立後,第一台重量高達兩噸的機器人 – Unimate 也很快在 1959 年就發展出來。雖然 Unimat e的機械手臂,只具有雞肋般前後、左右移動的功能;但畢竟這只是原型機,屬於機器人的時代才正要開始。
Unimation 進一步改良原型機,並於兩年後的 1961 年推出第二代 Unimate,並被通用汽車(General Motors, GM-US)用來生產車門等硬體設備。至 1969 年時,Unimate 甚至已能夠完成 90% 的汽車焊接作業。
如此極具生產效益的機器人,也讓美國、英國、德國與日本掀起一場猶如軍備競賽般的科技競爭;不管是檯面上的政策鼓勵,還是檯面下的投資研究,都讓機器人能更貼近生活層面的應用。
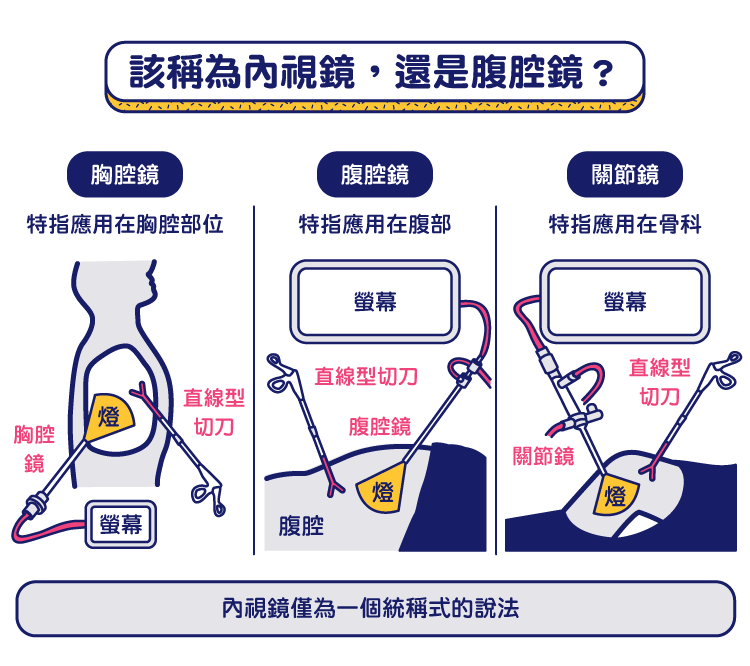
當機器人邁入同步製造的「多機器人工作單元」 (Multi-Robot Work-Cell) 時代時,微創手術的靈魂之窗 — 硬管式與軟管式的內視鏡也逐漸被發展出來。不過這還遠遠不夠,此刻的機械手臂還不夠靈活,內視鏡也只是透過另一端的目鏡來取得影像。不過既然微創手術的輪廓已出現,剩下就是需要一個理由來持續改進。
這個理由剛好就被與前蘇聯爭得水深火熱的美國所創造,那時,美國終於在 1961 年趕上蘇聯,成為第二個讓人類進入外太空國家。但美國不單只為了贏得這場太空競賽,探索未知的宇宙才是它真正的目標。
但探索是需要時間的,隨著太空人在太空滯留的時間越來越長,問題就出現了;倘若太空人突發需即時治療的症狀時,該怎麼辦呢?於是 1972 年,具遠端操控的醫療機器人,便被構想出來。
雖然說要讓遠離地球表面 400 公里之遠的醫師,來操控這個遠在太空的機器人是有那麼困難一點。但這不外乎提供一種技術發展的可能。
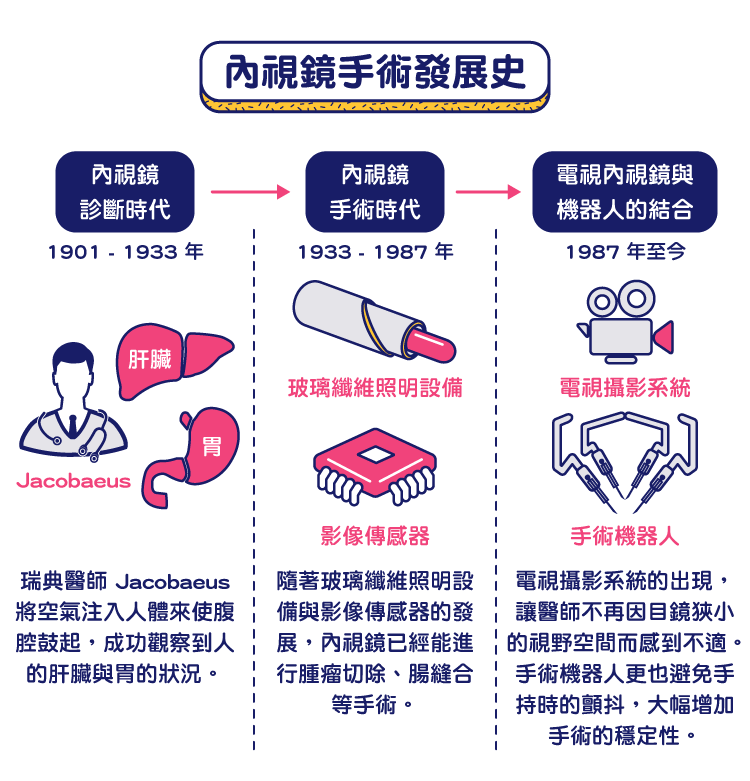
此時,動作粗獷的工業機器人,顯然還未達醫療所需細微動作的標準。所以即使 1980 年代,能在螢幕上顯示影像的影像傳感器 (Charge Coupled Device) 技術已發展出來;但由於機器手臂還無法靈活操作,直接操作手術器械的方式,仍還是比較可行的方式。
雖然技術還沒全然到位,不過這並沒有妨礙微創手術的發展。早在 1960 年代就發明出來的纖維內視鏡,就是利用光纖可撓式的優點來傳遞影像。如此,即使在小創口的空間中,鏡頭仍可以靈活調整來擷取影像。
1987 年,法國醫生 Philippe Mouret 率先利用這些知識基礎,將內視鏡的影像投放在電視螢幕,並以特製化狹長的器械進行手術操作。Mouret 完成的不僅是世界上第一例腹腔鏡膽囊切除手術,更透過外接影像讓患部的視野變得更加清楚,改善了過往直接利用目鏡觀察常有的眼睛酸澀感,讓醫師更有辦法進行長時間精確的手術。
腹腔鏡手術的成功,似乎已讓微創手術充滿前景。但微創手術還不因該僅是如此,除了像切除組織這種大目標的操作外,腫瘤手術更要求需要能作出細微的操控手法。
隨著微創手術的應用範圍越廣,時間也將逐漸拉長;此時,人的手臂也將無法避免遇到疲勞與顫抖等生理限制的問題。
看起來,機械手臂仍顯得勢在必行。美國太空總署的願望還在等待之際,美國國防部更也希望能基於這基礎,發展出遠端操控的醫療機器人,期許能夠讓軍人在戰區獲得最妥善的醫療照護。
當然,這一切只是太空總署與五角大廈的構想,這個令人期盼的重責大任,就交由擁有相當研發實力的史丹佛研究院 (Stanford Research Institute) 扛下。史丹佛研究院便與醫生合作,成功設計出能夠遠距離操控的「遠程手術系統」。
然而受限於當時無線電的操控技術,想要讓「遠程手術系統」達到無縫且即時的目標,還是有那麼點困難。更何況是遠距 400 公里之遙的外太空。相較之下,手術房中僅僅數公尺的距離,只要直接利用有線設備就能輕鬆達到即時操控目標。
雖然直到現在,太空總署與五角大廈的夢想都還未能實現;但歸功於「遠程手術系統」的技術奠定,讓爾後兩家機器人手術大廠:Computer Motion 與 Intuitive Surgical,得以延續基礎來不斷進行技術改良。
Computer Motion 率先於 1992 年推出能夠輔助支撐內視鏡的手術機器人,成功解決了手持影像可能的顫抖問題。等等,即使如此,這功能看起來仍一點都不智慧;此外,長時間操作手術器械的疲勞感,更也仍然存在。
Computer Motion 當然也知道這問題,但這就得先著手解決「自由度」的問題。
所謂的「自由度」,即是指物體以座標為原點,所能進行運動範圍的數目。例如,鎖螺絲時由上而下的順時針旋轉,就包含了「上下」與「旋轉」兩個自由度。此外,隨著物體的「自由度」越多,就越可能遇到互相碰撞的問題,在機械設計上也將更顯複雜。
歸功於原型機的基礎奠定,Computer Motion 又再於 1998 年推出新一代的手術機器人 – Zeus。Zeus 是世界上第一台能讓醫生在遠端操控機械手臂的機器人 (雖然也不過相隔幾公尺而已) ,但這種間接的「主從動式」 (Master and Slave) 操控方法,倒是真正解決了過往困擾許久的疲勞與顫抖問題。
此外,Zeus 的靈活程度更來到六個自由度,也只比有著七個自由度的人類手臂稍微遜色一點。
此刻,Computer Motion 另一個晚了好幾年的對手 – Intuitive Surgical,終於也在 1999 年迎頭趕上,發表同樣具有「主從動式」的手術機器人 – 達文西 (da Vinci) 。沒錯,這就是近年來聞名遐邇、平均使用價格高達 20 萬的達文西。
狹路相逢的 Computer Motion 與 Intuitive Surgical,很快就在法院前見面,互相控訴對方專利侵權。整整纏鬥了三年,Computer Motion 最終還是不敵背後有 IBM 資金撐腰的 Intuitive Surgical。
雖然崛起之路好像不是很榮耀,不過 Intuitive Surgical 倒也一統當時最先進的技術,並將心力全然放在技術研發上。Intuitive Surgical 所帶來技術上最大的變革,莫過於提供 3D 影像技術與具七個自由度的機械手臂。
3D 影像終結了過往透過內視鏡的力回饋,來探查組織深淺的方法,除了能更直覺、也降低對組織造成傷害的可能。七個自由度更讓機械手臂能如人手般,自由靈活地操作。
雖然目前看起來,手術機器人已幾近完美,但倘若需要更侵入、更細緻的操作,勢必還要發展更靈活的關節操控技術。就如,微創手術目前還無法達到骨科手術的要求:完整骨骼復位與不影響血液循環。
此外,在技術不斷演進之際,微創手術的成本將無法避免地高漲,更也埋下日後能否普及的一大隱憂。要想降低技術所帶來的成本,最終還是得依靠技術來克服。
例如達文西的器械只能使用十次,因此耗材成本始終高居不下。若能改良器械的耐用度,讓成本攤提的時間拉長,就能使醫院、病患的負擔不至於過大。
技術是一條永無止盡的改進之路,其為的不只是讓夢想成真,更是為了讓夢想能在每個人的生活中實現。
參考資料
【延伸閱讀】
超好賺!
每天都有任務能拿獎勵,快點擊查看!



全球CMOS影像感測器的領導廠商.png)