1

商業
自動駕駛的慘案不勝枚舉。
而這很可能是我們的錯覺。因為實際上目前為止的每一例自動駕駛事故都能在新聞裡找到時間、地點、經過,它們合起來數量也不那麼多,和每天在路上發生的交通事故比,這只是滄海一粟,但無一不引起極大關注。
人們很在意自動駕駛事故的原因,這影響到最終是給汽車定罪還是給駕駛員定罪,而問題多半被指出是出自人為操作的失誤。對駕駛員更嚴格的駕駛經歷、培訓經驗要求,以及自動駕駛相關技術水平的提高能減少這種失誤的發生,不過除了這些之外,也許我們忽略了一些從一開始就沒解決好的問題:傳統的自動駕駛分級規則存在一定的弊端和不合理性。
基於這個問題,美國汽車媒體 THE DRIVE 主編 Alex Roy 提出了一種新的解決方案——也就是重新給自動駕駛系統進行分類。這確實是一個值得關注的問題,所以我們來看看他的觀點,GeekCar 編譯如下:
在自動駕駛領域,因為技術限制和含糊的術語,人們正在付出生命的代價。我認為,自動駕駛汽車語言本身是存在問題的,並且 SAE 級別也應該被重新定義。
這並不是說發明 SAE 級別的工程師們在技術定義上搞錯了,而是說經過媒體引用、製造商使用、投資人考量、行銷公司利用這些不適合大眾傳播的術語後,終端使用者承擔了危險的結果。
要改變目前的狀態,第一步就是要做到明確。無論從技術角度還是文化角度來說,一個技術相關的詞彙或短語只能精確地代表一種意思,而不能衍生出新的含義。
我們知道,含糊不清會在各種狀況下帶來危險,而當涉及汽車領域時這種混亂導致的風險極為嚴重,例如人們已經因為誤解了半自動化的含義而出現致死事故。
特斯拉(Tesla, TSLA-US) (Tesla,TSLA-US) 也同意這種觀點。因為當特斯拉將自動駕駛相關的事故歸結為「人為責任」時,實際上這個公司在說的是「我們的產品已經按照預期工作了,問題是駕駛員操作失誤。」
所以做到語言明確,已經成為了道德層面的要求。為此,我們列出了一些意思不夠明確的單詞或短語,並在此提出了可能解決問題的方法。
自動駕駛 (Self-Driving):
自動駕駛只應當用於描述完全自主駕駛的汽車。一輛真正的自動駕駛汽車能夠完成你所認為的一切「自動駕駛」功能,可惜不幸的是,自動駕駛這個詞一直被用於形容還未到達此標準的汽車。
比如特斯拉的自動駕駛系統 Autopilot 就是最好的例子。特斯拉的 Autopilot 可以在有限的時間段內自行駕駛,但前提是必須有個活人隨時做好接管車輛的準備,所以這其實並不能叫自動駕駛,最多也就是半自動駕駛而已。
不過,半自動駕駛這個定義太模糊,基本沒什麼用。「自動駕駛」只有在遵守它的最嚴格定義時才有意義,這時候一輛自動駕駛汽車可以按照人工駕駛時的各種方式自行駕駛。
無人駕駛 (Driverless):
無人駕駛和自動駕駛的含義有一定的重疊,但是它的意思相當混亂。目前,無人駕駛這個詞可以替代的東西太多了,它可以表示一輛沒有方向盤或踏板的汽車、具有自動駕駛和承載乘客能力的交通工具、沒有一個人在裡面的車,還有像加州創業公司 Phantom Auto 或矽谷創業公司 Starsky Robotics 所發明的那種被人為遠程控制的無人汽車。
自動化 (Automated/Automation):
自動化可以簡單概括為由機械完成的重複性任務。我們已經掌握這項技術上百年了,ABS (防鎖死煞車系統) 就是一種自動化的應用,還有擋風玻璃的雨刷器也是。
今天我們看到的所有汽車都是部分自動化的,但是沒有一輛車能被稱為完全自動化,因為它們並不是在任何地點完成任何任務時都能擺脫人工操作。舉個例子,我們現在有了自動排檔,自動變速器可以選擇正確的前進擋,但是它只有等司機作出「駕駛」、「停車」、「空檔」等決定後才能開始工作。
也就是說,如果一個核心操作中人的存在是必要的,那你只不過是一台高度自動化的機械;只有當人完全不需要出現在操作過程中時,你才算進入了下一個階段:自主駕駛。
自主駕駛 (Autonomy/Autonomous):
自主是什麼意思呢?它指的是無論掌握的信息是否完全,主體也可以進行自由思考或行動。能自我思考和運作的自主駕駛汽車在理論上是可能的,但是目前這種車還不存在,也沒有接近它的產品。就算是 Waymo 最先進的汽車也不是,因為它被限定於一個清楚定義的位置,它被叫做「域 (domain) 」,只有在這個區域內汽車才能自己運行。由於 Waymo 的車離不開人,只能在有限的時間段內工作,還對天氣有要求,所以它並不是自主駕駛車。
自主駕駛這個詞只能在機器的決策符合或超過人類決策標準時使用,這裡指的不是機器的決策品質上超過人類,這不太可能,而是從數量的角度來看,它的決策標準也應當是最嚴格的標準。

機器人汽車 (Robocars):
英語裡「robo」這個字首不過是形容自動化的另一種方式,所以機器人汽車和自動化這個詞有相同的缺陷,那就是太模糊以至於沒有意義。可以說具有任何級別自動化的任何東西,都可以被稱為機器人。
半自主駕駛 (Semi-autonomous):
為了避免「自動駕駛」、「無人駕駛」、「自動化」、「自主駕駛」等詞裡帶有的絶對性意義,很多人都使用過半自主駕駛這個詞。不過「semi」這個英文字首就像個 OK 繃,它沒能解決核心問題。
讓我們看看 NHTSA 網站上最新的 SAE 標準表。
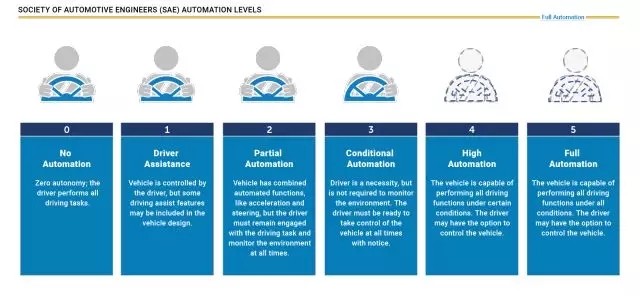
SAE (Society of Automotive Engineers) 對自動駕駛的各個級別做出了定義,其中唯一提到「自主駕駛」的就是 L0 級別,它說 L0 意味著汽車具有「零」自主性。這句話不僅有誤導作用,讓人們以為車輛的自主性從 L1 開始存在,還暗示著自主性也包含著不同的層級。 (可能自主性未來會有不同層級,即兩個不同的自主駕駛系統可以圍繞同一障礙物提出不同的行駛路徑,但目前還不存在這種級別之分。)
事實上,目前車輛可以根據能否自主駕駛分成兩類,一類是可以自主駕駛的,一類是無法自主駕駛的。根據這種定義,自主駕駛只能存在於 SAE L5 級別的車輛上,這時汽車也可以被稱為「全自動化」。除此之外,任何將不夠 L5 的車輛形容為半自主駕駛車,都是將高度自動化誤認成自主駕駛的危險觀點。
半自動化 (Semi-Automated):
半自動化能形容 L1 到 L4 之間的任何自動化水平,並且將它本身和自主性進行了區分——半自動化意味著沒有自主性,不過這個詞在描述自己特定的功能時就會遇到麻煩,無法具體形容。
想通過使用「部分 (自動化) 」這類同義詞,或者「有條件的 (自動化) 」這類定語也沒用,因為 L3 也是部分自動化,L2 也是有條件的自動化,而且每個生產廠家的半自動化系統都可以在不同場景下運作。另外,使用子定義的方式也有問題,比如它不能形容並行系統、遠程操作系統等自動化的類型。
高級駕駛輔助系統 (Advanced Driver Assistance Systems;ADAS):
ADAS 是由「自適應巡航」、「自動緊急制動 (AEB)」 、「車道保持 (LKAS) 」等技術組成的高級駕駛輔助系統。SAE 圖表裡沒有提它,但公平地說,ADAS 是目前唯一應用的道路系統,人們容易把它和 L2 混淆。
雖說 ADAS 有唯一性,但所有 ADAS 套件都不一樣,例如特斯拉的 Autopilot 和凱迪拉克的 Super Cruise 由於具有高級功能,容易被誤認為是 L3,但實際上從技術角度來說它們都屬於 L2。另外,媒體經常會把它們描述成 L4,這也不對。
如何重新定義 SAE 級別?
未來學家 Brad Templeton 曾經指出,根據人為操作的參與程度來定義自動化的等級,是一個根本的錯誤 。我們應該注意到,任何要求有人為操作的系統,都是站在了使用者的角度,以追求操控的有效性和安全性。任何沒有明確指出什麼時候必須有人為操作的系統術語,都潛在著危險。
按照這個邏輯,可以說自動化只有兩種類型:有人為操作的系統,完全「零」人為操作的系統。
沒有人會相信未來幾十年內「零」人為操作的汽車將被普遍應用在所有區域,但需要人為操作的汽車可以去到幾乎任何地方,這已經是一個共識。可以推測的是,今年內,Waymo很可能在亞利桑那州的特定地方推出完全不需要人為操作的「無人車」了,不過它們將在地理上受到侷限,只能行駛在條件最優的「域」,並且這種侷限還會持續數十年。
因此,其實定義自動駕駛時不應該根據人為操作的程度,而是根據位置。
我們要做的是拋棄級別,而不僅僅是換一種區分級別的方式。
現在我們可以提出一種定義汽車自動化系統的簡單方法,它不是用等級來定義,而是按照功能來區分類別。這樣的話,系統可以被分為兩種類別:位置自主駕駛系統,人類輔助系統 (HAS) 。
一輛車可以搭載上述的其中一種系統,也可以同時搭載兩種系統。
地理自主駕駛系統 (Geotonomous/Geotonomy):
地理自主駕駛的意思是,被地理位置所限制的自主駕駛。從英語的角度看,我們使用了 geography 的字首「geo」來強調一個問題:車輛在哪裡運行?地理自主駕駛這個新術語可以取代自動駕駛、自主駕駛、無人駕駛等一系列詞彙。
地理自主駕駛系統可以掌握車輛的位置數據,只有在有法律授權的情況下才能使用、傳播、公佈數據,數據洩露時由系統提供商承擔 100% 的責任。
對於未來的 Waymo、Uber、Lyft 和滴滴等有商用車隊的公司來說,地理自主駕駛系統和他們共享出行 App 的結合非常重要。隨著「域」的拓展,自主駕駛系統也將不斷成長,它的成長目標應當是在功能上完全成為自主駕駛的代詞。
人類輔助系統 (Human-Assisted Systems;HAS):
所有不屬於地理自主駕駛系統裡的功能,都屬於人類輔助系統。這個系統是對人類和 ADAS 的結合,並且明確地把焦點集中到人身上,因為如果系統操作中需要活人的參與,那「人類」這個詞就應該在系統名字裡出現,這樣也更容易避免人們對「自主駕駛」、「自動化」、「地理自主駕駛」等詞的誤解。
一輛具備人類輔助系統 (HAS) 的汽車,在發生問題時將由當事人負 100% 的責任。
為什麼要叫做 HAS,而不是用 ADAS?一個是因為 ADAS 全名太長了,另外,在這個英文短語裡指代人的詞「driver」只排在第二位,第一位是「advanced」。
HAS 不分級別。因為如果系統對人為操作的要求與對駕駛員操作的安全要求相同,那麼沒有系統能分出安全級別。雖然說自動緊急制動 (AEB) 等特別功能可以做出這種分級排序,但是需要統計學的數字支撐。除非為了方便,沒有必要給 HAS 分級。按照便利性給 HAS 分級的方法已經有人開始研究了,它可以作為日後的討論。
如果說不是地理自主駕駛系統就是 HAS,那 HAS 肯定會有一些不清楚的灰色地帶的。例如並行系統算不算 HAS?遠程遙控操作算不算 HAS 呢?應該都算,這樣能避免有人誤認為它們不需要人工操作,或擁有任何的自主性。
在這裡我們就不列出來了。
因為對 HAS 來說,保持足夠的模糊性反而很重要,這樣才能給尚未發明的未來技術一定的生存空間。
《車云網》授權轉載
【延伸閱讀】
超好賺!
每天都有任務能拿獎勵,快點擊查看!


打破CEO神話-四項成功領導者的關鍵特質_-.png)