1

產業
各家企業熱熱鬧鬧公佈自動駕駛計劃之後,觀眾們最大的疑問便是:全球自動駕駛技術哪家強?
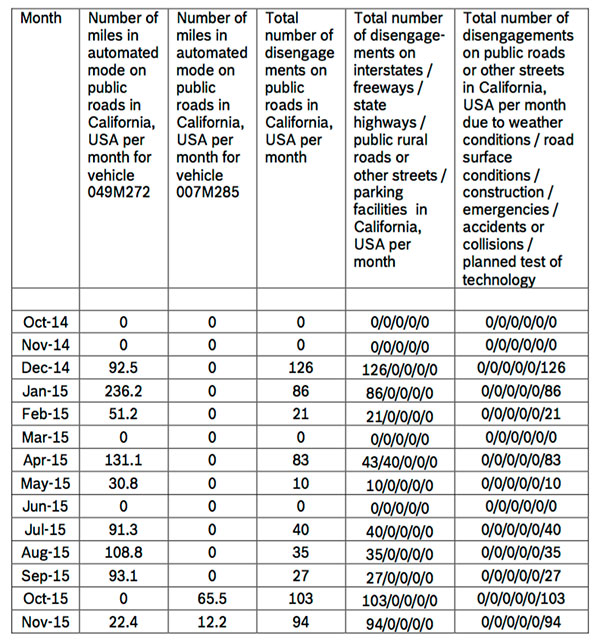
在美國加州獲得牌照測試自動駕駛的企業,去年年底都被要求交了一份“脫離”報告。這裡的“脫離”是指汽車在測試時,終止自動駕駛模式改由人工控制或無法進入自動駕駛模式。雖然不能涵蓋所有正在自動駕駛測試的公司,但從加州小組的成績也可以大致了解全球大梯隊的進展。
為了讓數據更加直觀,筆者將加州車輛管理局(DMV,Department of Motor Vehicles)官網資訊匯總了一下。
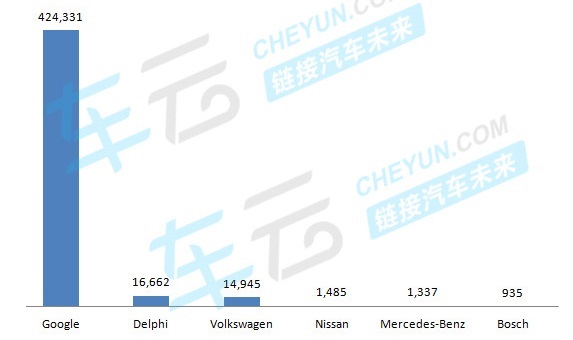
2015年6間企業自動駕駛車累計路程(英里)
每家自動駕駛汽車都處在里程累積階段,測試的路程長短直接影響自動駕駛汽車的行駛經驗。顯而易見的是,Google在自動駕駛里程數的累積上以壓倒性424331英里(約682895千米)佔據排行榜第一。緊接著的是德爾福、福斯、Nissan、Mercedes-Benz以及博世。比較特殊的是,特斯拉(Tesla, TSLA-US)雖然已經獲得了測試牌照,但是這家公司對行駛數據保密,記錄的脫離次數為 0。
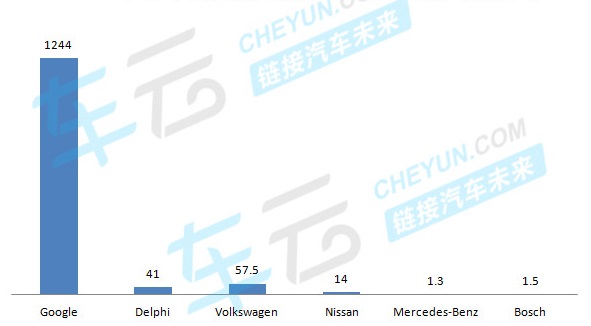
2015年6間企業自動駕駛車無人工干預單次行駛里程(英里)
如果將行駛里程和脫離次數相除,可以得到一個無人工干預單次行駛距離的平均值,某種程度上可以反映各家自動駕駛汽車的可靠性。Google仍然以1244英里(約2002千米)居於榜首,賓士使用自動駕駛模式行駛的距離最短。不過,因為各家測試地點不同,時間、天氣等因素也存在差異。比如賓士有部分測試在城市內進行,而福斯的兩輛車全在公路自動駕駛。橫向比較時要考慮很多原因,所以我們可以一個個看各家表現。

Google自動駕駛測試開啟於2009年,一直走的是全自動駕駛路線。2014年5月無人駕駛原型車首次公開,同年12月23日全功能原型車亮相。在2014年12月獲得加州自動駕駛牌照之前,Google的自動駕駛汽車就已經在舊金山和洛杉磯累計行駛里程。
翻看向DMV遞交的報告可以發現,Google是六家企業中對“脫離”情況標註最詳細的一位。報告裡解釋了272起事故是因為GPS讀取錯誤、檢測到轉向或自動功能錯誤等引起,因此電腦決定人類干預。另外69起案例人類主動接過了方向盤的駕駛權,其中13起是可能引發事故進行的干預。
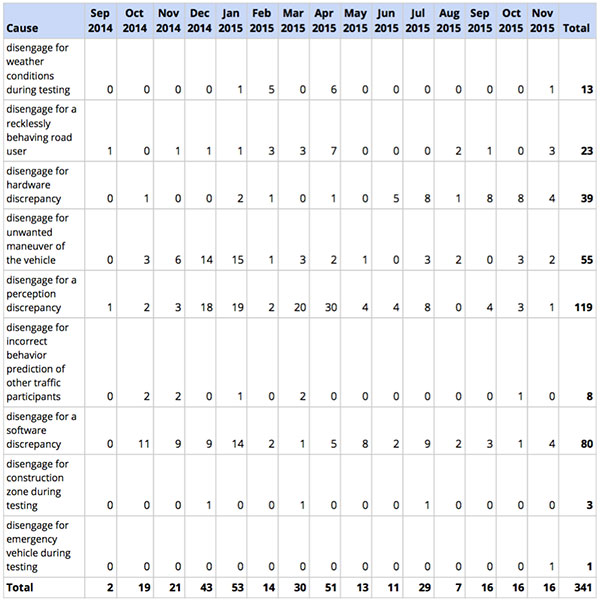
Google自動駕駛汽車脫離原因匯總

福斯汽車集團為了自動駕駛在內的技術研發,在矽谷成立了一個電子研究實驗室(ERL),公司在德國Ehra-Lessien還尋找了一塊自動駕駛試車場,可以在封閉場地模擬公共交通的環境測試車輛。在今年的日內瓦車展上,福斯宣布2025年要將可在城市內自動駕駛的產品帶向全球市場。
目前福斯在加州的所有測試都在公路上進行,路況相對簡單。兩輛測試車的測試時段分別為2014年9月19日到2015年11月30日、2014年9月29日到2015年1月9日。報告中的車輛在“脫離”時都能報警,“脫離”原因比較抽象,包括車輛基本需要沒有滿足36次,數據丟失5次,車側面有運動物體8次,沒有接收到規劃器數據30次,規劃器沒有準備好150次,監視器錯誤31次。
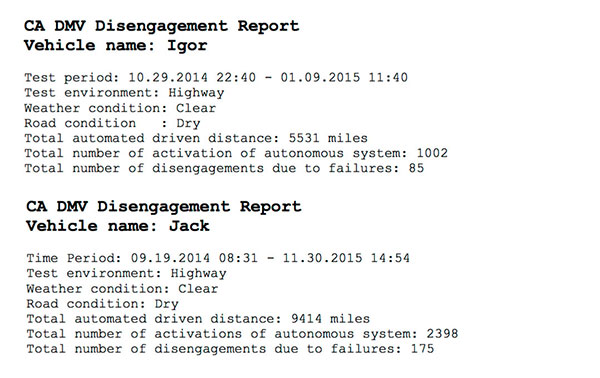
福斯自動駕駛汽車脫離數據匯總

Nissan公佈的自動駕駛計劃分為三個階段,技術套件用Piloted Drive命名。1.0版本明年日本首發,允許車輛在高速公路上自動駕駛。2018年將推出2.0版,在1.0基礎上加入高速自動變道功能。2020年Piloted Drive 3.0可以在城市交通中無人干預實現自動駕駛。
Nissan報告中挑戰的區域大多數是城市街道,其次是在城市公路。報告中車輛遇到狀況的反應時間都在1秒內,期間有過一次雨天行駛電腦死機,反應時間長達4秒。需要人類幫忙插手的原因大致為天氣、路面情況、建築施工、緊急情況、事故或碰撞以及因為測試自動駕駛技術本身需要。
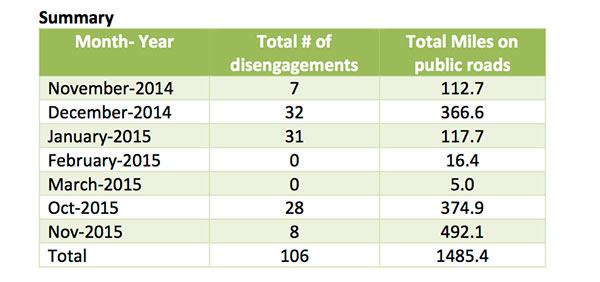
Nissan自動駕駛汽車脫離數據匯總

根據戴姆勒在2013年宣布的計劃,公司會在2020年之前開始銷售自動駕駛汽車。賓士是與奧迪、Google同期獲得加州自動駕駛測試車牌的首批企業之一。除了加州牌照之外,戴姆勒2015年還在內華達州開始測試兩款自動駕駛卡車,今年1月又有3輛賓士E級在內華達獲得了自動駕駛標準生產汽車的牌照。
賓士報告裡的測試時間歷經2014年9月到2015年11月。目前獲得牌照的車有5輛,其中3輛在試驗場測試,真正上路的只有兩輛。測試中汽車自己判斷的“脫離”為471起,反應時間都在1秒左右,人類主動介入的情況有496起。報告關於原因的解釋特別含糊,主要為司機不舒服、技術評估管理、道路施工等,並不能反應太多系統可靠性。
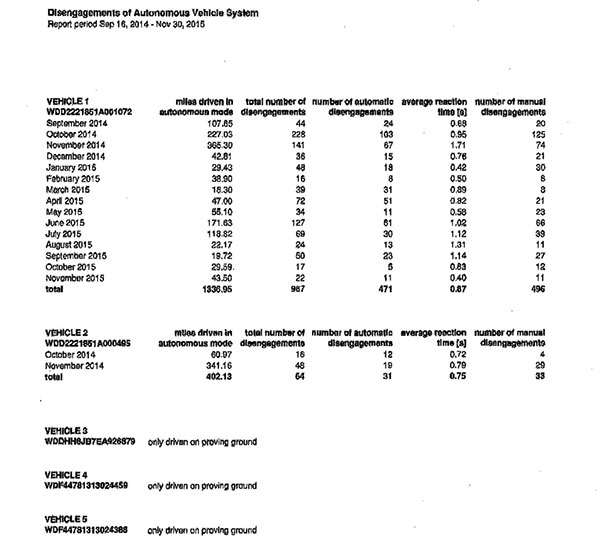
賓士自動駕駛汽車脫離數據匯總

作為一家零件供應商,德爾福配合著車廠2020年自動駕駛普及的計劃在儲備技術。除了加州的測試之外,去年紐約車展的時候,德爾福就將一輛自動駕駛汽車從舊金山開到了紐約,全程約3500英里。
在“脫離”報告中,德爾福的測試時間跨度從2014年10月7日到2015年11月30日,兩輛自動駕駛車均為奧迪SQ5。在德爾福發生的16662次“脫離”中,街道場景佔了大多數,其次是十字路口和公路情況。排在原因頭兩位的是車道線模糊110次,檢測信號燈102次,其它依次為系統調試和校準62次,擁堵交通時的變道50次,行人很多的情況下防禦性介入22次,其他司機的意外行動21次,施工區域17次,停車失敗8次,救護車相關7次,以及為自行車挪位置時防禦性介入6次。
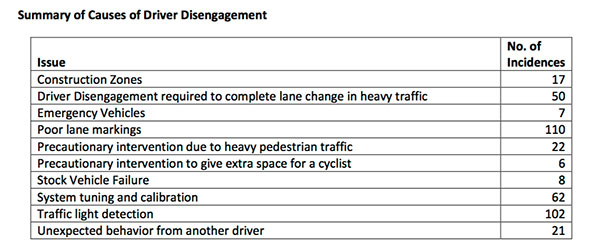
德爾福自動駕駛汽車脫離原因匯總

博世在2011年就開始討論自動駕駛技術,加州帕洛阿爾托技術中心附近一直有自動駕駛車輛測試。同樣,這家零件公司的自動駕駛技術發展路線也是漸進式,由半自動駕駛向高度自動駕駛、全自動駕駛過渡。
博世報告涉及的測試時間從2014年12月14日起,至2015年11月15日止,其中只有40起“脫離”發生在高速公路,其餘都在城市十字路口。博世覺得“脫離”模式很難界定,因此原因寫的比較模糊,都是測試自動駕駛技術本身需要。
博世自動駕駛汽車脫離原因匯總
從各家報告來看,在持續累積里程數的企業並不多,或許是出於保密等因素,一些報告中原因解釋的部分並不詳實。雖然看起來Google在里程上有壓倒性的優勢,但測試環境因素複雜、標準也不統一,而且總體數據量並不夠大,給人更多的感覺還是各家在齊頭並進,誰也沒有取得絕對的領先。
各家自動駕駛汽車在交互系統的表現都還不錯,可以在較短的時間警報大多數的“脫離”情況。一些脫離情況的細節可以看出,自動駕駛面臨的挑戰仍然是從高速路開進城市。在十字路口、交通信號燈以及人流密集處,自動駕駛汽車仍然無法處理得得心應手。另外結合DMV官網上的事故報告,包括Google近期與公車發生的那起事故也在警示我們,自動駕駛汽車在複雜交通環境中的行駛還需要更多突破。
《車云網》授權轉載
超好賺!
每天都有任務能拿獎勵,快點擊查看!
勞斯莱斯的野心:遠洋無人船以及背后的黑科技_-.png)